chatgpt专题
装饰器
数据仓库
Nacos
大端
微信授权功能
医学统计学
控制浏览器的方式
Junit常用注解
四轴
Async注解失效
C/C++面试
MobaXterm终端神器
启动过程
类
地图模拟数据
dos命令行
SOME/IP
paddle
阵列天线
运动控制
2024/4/11 21:44:39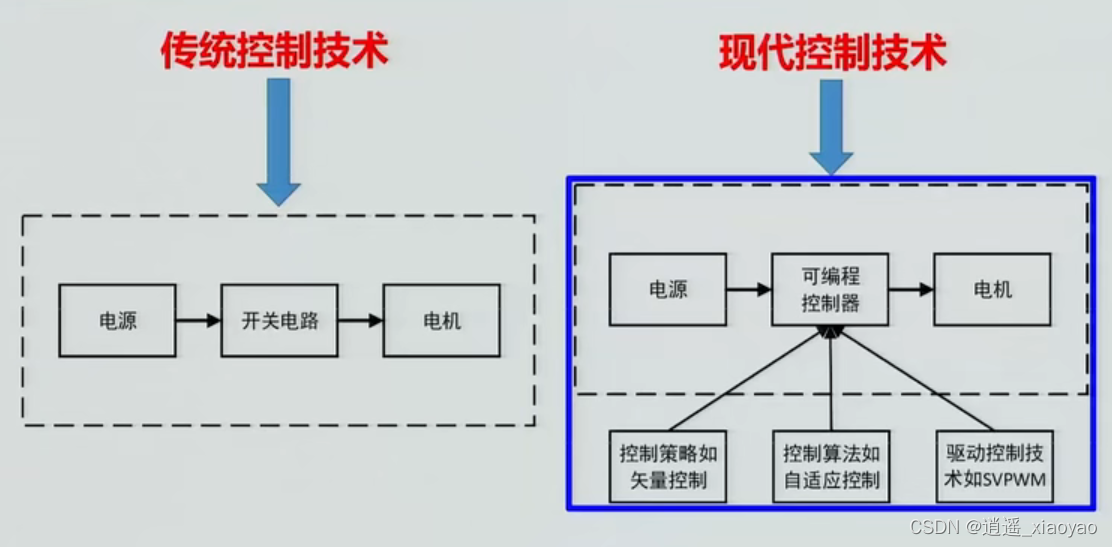
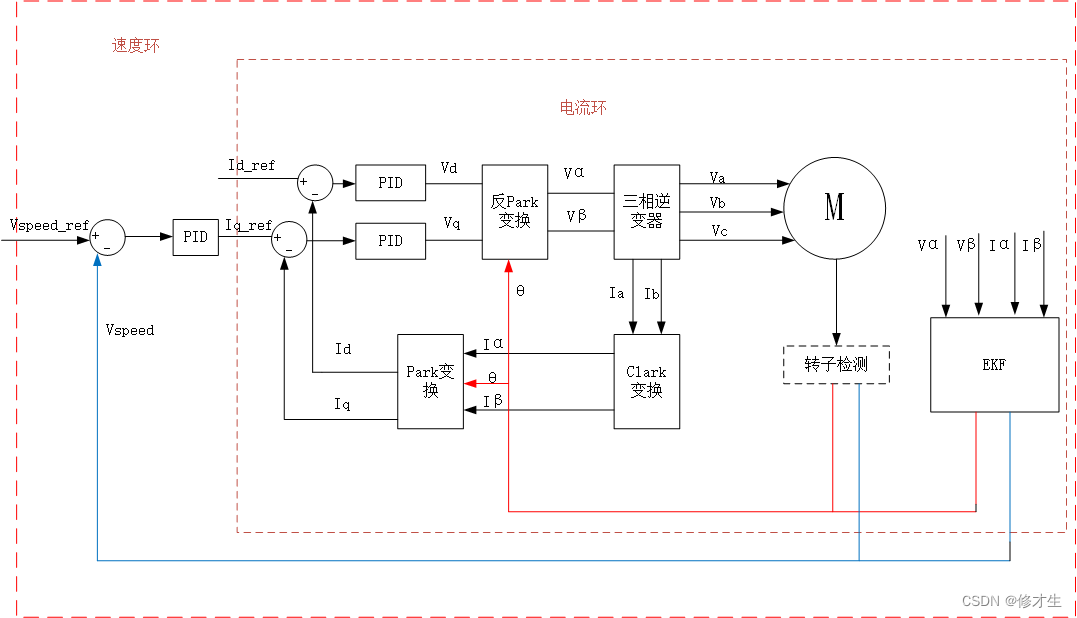
电机控制::控制技术与控制要求
功能要求性能要求基本FOC基础控制(刚性调参)稳、准、快系统性能优化先进控制方案: 精准建模惯量辨识(机械参数辨识:辨识 or 观测)先进控制方案(算法环节)SMC、ADRC、自适应、扰动观测…
SMART PLC梯形速度曲线轨迹规划(追剪从轴控制)
在介绍本专栏之前,大家可以参考另一篇博图PLC的梯形加减速点动功能块介绍文章
梯形加减速点动功能块(博途SCL)_RXXW_Dor的博客-CSDN博客文章浏览阅读184次。SMART PLC斜坡函数SMART PLC斜坡函数功能块(梯形图代码)_RXXW_Dor的博客-CSDN博客斜坡函数Ramp的具体应用可以参看下…

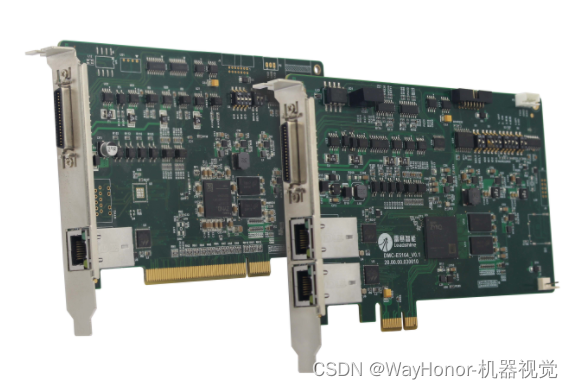
XPCIE1032 — 高速高精,超快交互速率的PCIe EtherCAT实时运动控制卡
产品导读
XPCIE1032是一款基于PCI Express的EtherCAT总线运动控制卡,可选4-16轴运动控制,支持多路高速数字输入输出,可轻松实现多轴同步控制和高速数据传输。
XPCIE1032集成了强大的运动控制功能,结合MotionRT7运动控制实时软核…
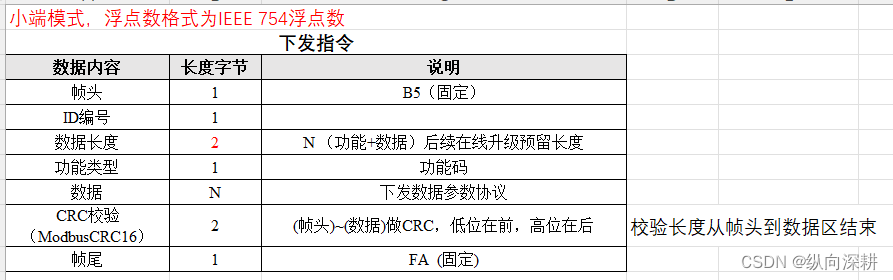
机械臂运动控制,通讯的解包->运动控制->数据封包上报过程
一、协议 数据格式为小端模式,浮点数格式为IEEE754,需与上位机的PC端一致,如window系统,其它系统需要自行测试,用于传输16位、32位、float数据格式,避免只传输字节数据带来转换的繁琐及精度丢失。 二、下位…
自动化上位机开发C#100例:如何用面向对象的方式封装雷赛运动控制卡EtherCAT总线卡(C#代码)
自动化上位机开发C#100例:雷赛运动控制卡EtherCAT总线卡C#封装类 文章目录 LTDMC.dll下载LTDMC.cs LTDMC.dll C#调用封装下载ICard.cs 运动控制卡接口Card.cs 运动控制卡抽象类CardLTDMC.cs 雷赛运动控制卡EtherCAT总线卡实现类CardList.cs 总线卡列表封装 LTDMC.dll下载
最新…

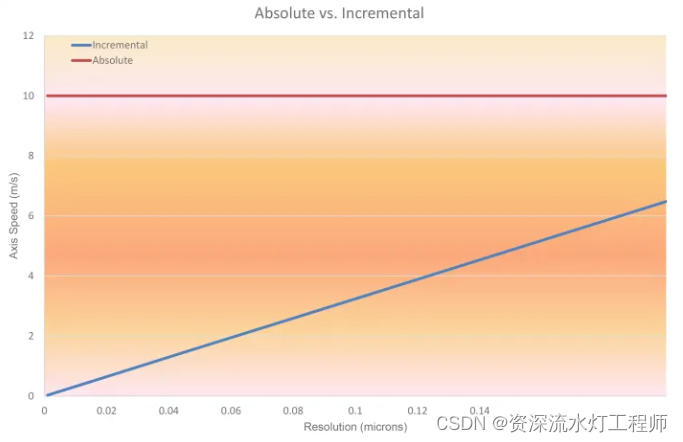
运动控制:分辨率、定位精度、重复定位精度
分辨率,定位精度,重复定位精度三者之间有什么关系?
对于这个问题,我相信,很多刚开始做设计的伙伴们,都有这样的疑问。
今天,不墨迹,直接讲问题。
先说分辨率,这个最容…
闭环控制里的采样周期和执行周期
运动控制对系统的实时性要求都非常高。所以大家可以看到运动控制总线的刷新周期越来越快,越来越短。今天我们讨论下实时性不高的总线会带来哪些问题和挑战,以及这种大延时总线如何解决实时性问题,运动控制实时性问题还可以参看下面的文章博客:
随动控制之跟随给定和跟随反…
伺服丝杠系统常用运算功能块
这篇博客主要介绍伺服、丝杠系统常用的运算功能块,其它相关运算可以查看下面文章链接:
信捷PLC脉冲频率、位移、转速相关计算(C语言编程应用)_RXXW_Dor的博客-CSDN博客里工业控制张力控制无处不在,也衍生出很多张力控制专用控制器,磁粉制动器等,本篇博客主要讨论PLC的张力…
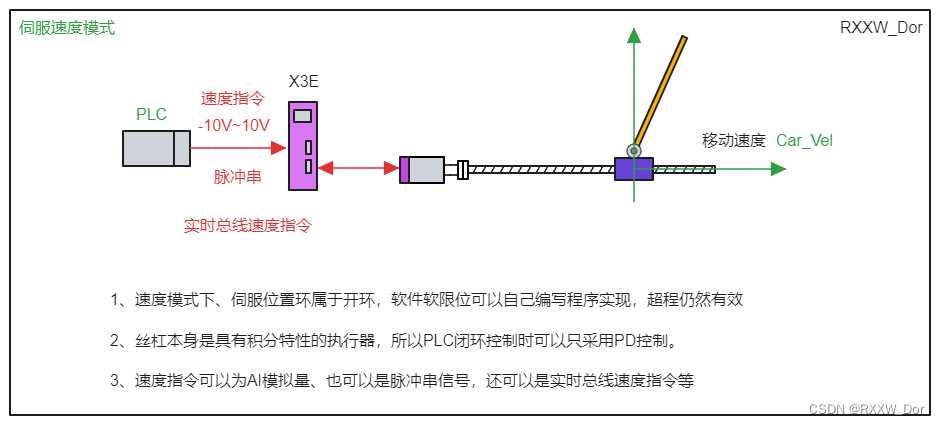
外部模拟量速度控制模式(禾川X3E伺服驱动器)
0-10V信号如何控制变频器实现正反转速度调节请参看下面文章:
模拟量0-10V信号控制变频器实现正反转速度随动_RXXW_Dor的博客-CSDN博客比例随动专栏有系列文章介绍,大家可以查看相关文章,链接如下:绕线机-排线伺服比例随动功能块&…

MPC模型预测控制器学习笔记(附程序)
本文用于记录学习DR_CAN老师发布的MPC系列视频教程的相关内容,文章中放的源码也是DR_CAN老师提供的程序示例,链接如下: DR_CAN老师的视频教程链接(点击可跳转) DR_CAN老师提供的程序示例(点击可跳转&#x…
汇川脉冲伺服SV630P常用参数设置(博途PLC脉冲输出控制)
有关博途PLC脉冲输出控制功能块详细介绍,请查看下面博客链接:
博途1200PLC轴控功能块(脉冲轴)_博图 轴控块_RXXW_Dor的博客-CSDN博客STRUCT// 轴使能// 轴正向点动// 轴反向点动// 轴回原// 轴复位// 轴暂停// 轴快速停机// 轴绝对定位// 轴相对定位// 轴匀速运行// 修改轴参…

PT/PVT运动模式介绍:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(十一)
XPCIE1032H功能简介
XPCIE1032H是一款基于PCI Express的EtherCAT总线运动控制卡,可选6-64轴运动控制,支持多路高速数字输入输出,可轻松实现多轴同步控制和高速数据传输。
XPCIE1032H集成了强大的运动控制功能,结合MotionRT7运动…
凸轮表(ECAM)的本质-运动控制轨迹规划(线性插值、3次样条插值、5次样条插值)
轨迹规划的重要性这里就不用多说,电子凸轮控制用到的凸轮表最终需要采用规划算法生成插值曲线,给到伺服的随动系统控制电子凸轮工作。通常运动控制器里对轨迹规划有5次样条插值和线性插值2种方法。
有关电子凸轮的详细内容,可以参看下面的博客,链接如下:
电子凸轮应用飞…

趋高技术开发出超低价的视觉尺寸测量仪软件
2024年1月1日元旦节当日,深圳市趋高技术有限公司Fuxi实验室开发组成员成功开发出一款视觉尺寸测量仪软件。这款软件类比市场价格处于超低价。仅报三千二百元。有需要的码农或客户都可以了解一下,带回家。 趋高技术HITREND是深圳的一家高科技公司。 …
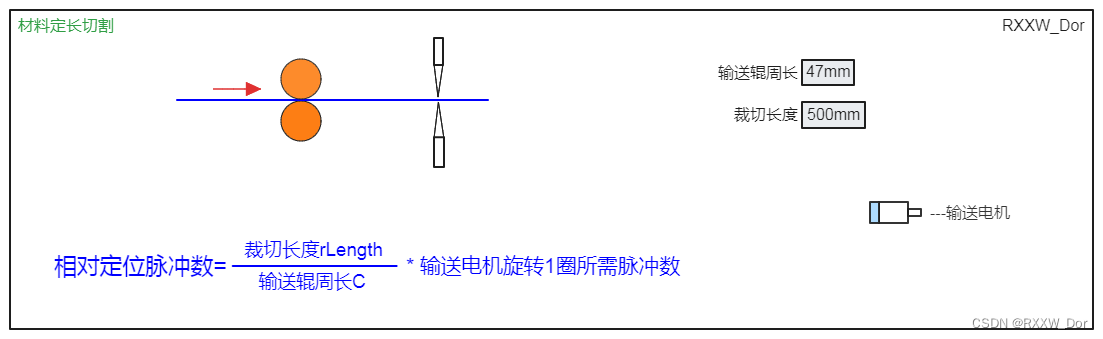
三菱FX系列PLC定长切割控制(线缆裁切)
三菱PLC绝对定位指令DDRVA实现往复运动控制详细介绍请查看下面文章链接:
https://rxxw-control.blog.csdn.net/article/details/135570157https://rxxw-control.blog.csdn.net/article/details/135570157这篇博客我们介绍线缆行业的定长切割控制相关算法。
1、输送…
轨迹规划::曲线拟合(多维几何问题)
一文教你快速搞懂速度曲线规划之T形曲线(超详细图文推导附件代码)_连续t型加减速曲线前瞻规划 程序_小麦大叔的博客-CSDN博客
一文教你快速搞懂速度曲线规划之S形曲线(超详细图文推导附件代码)_s曲线规划_小麦大叔的博客-CSDN博客…

基于ros1的 apollo 7.0.0规划控制算法
apollo.ros-7.0.0
上次给大家带来了之前学习apollo时开发的内容apollo.ros-1.0.0和apollo.ros-3.0.0,主要是针对apollo 1.0.0和3.0.0版本进行了ros1下的移植和规划控制算法的学习。本次在之前工作的基础上,针对apollo 7.0.0版本,进行了ros1下…
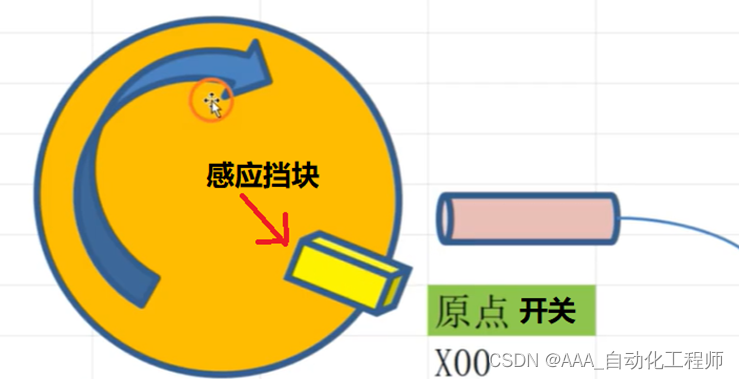
三菱FX3U系列PLC运动控制_伺服回原点的3种方法示例
三菱FX3U系列PLC运动控制_伺服回原点的3种方法示例 方法1: 运动的方向为圆形、环形、电机往一个方向转动; 只有一个原点开关,没有极限开关
如下图所示, 原点回归的方式为:启动回原点后,电机开始寻找原点开关,在找到原点开关的瞬间,开始减速;在离开原点开关的瞬间,电…
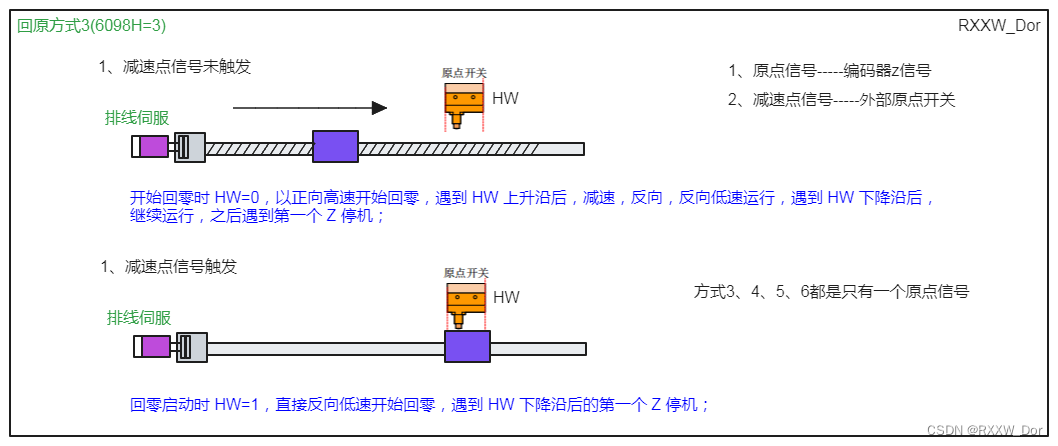
H5U PLC EtherCAT总线伺服回原(6098H=3)
回原方式35请参看下面文章
汇川H5U PLC通过 EtherCAT总线控制伺服回原_RXXW_Dor的博客-CSDN博客大部分运动控制都会对机械回原点进行大篇幅讲解,也可以看出机械回原点的重要性。常规的回原点方式大概有几十种吧,本文会给出常用回原点的注意事项,和编程推荐写法。如果原点回…
【最全,带注释版】雷赛运动控制卡库函数C#导出
发现雷赛发的最新的资料还没以前的详细,这里备份一下:
using System;
using System.Collections.Generic;
using System.Text;
using System.Runtime.InteropServices;namespace Hardware.ImportExternal //命名空间根据应用程序修改
{public delegate …