神经网络
tcp/ip
开发板评测
qt
搭建网站
天猫
心理健康管理系统
光源
字符串替换
neo4j
目录和文件管理
flownet
cloudera
游戏美术
数据驱动
编程开发
mq
rbac
Typora优点
word2vec
Ardupilot
2024/4/12 4:19:06
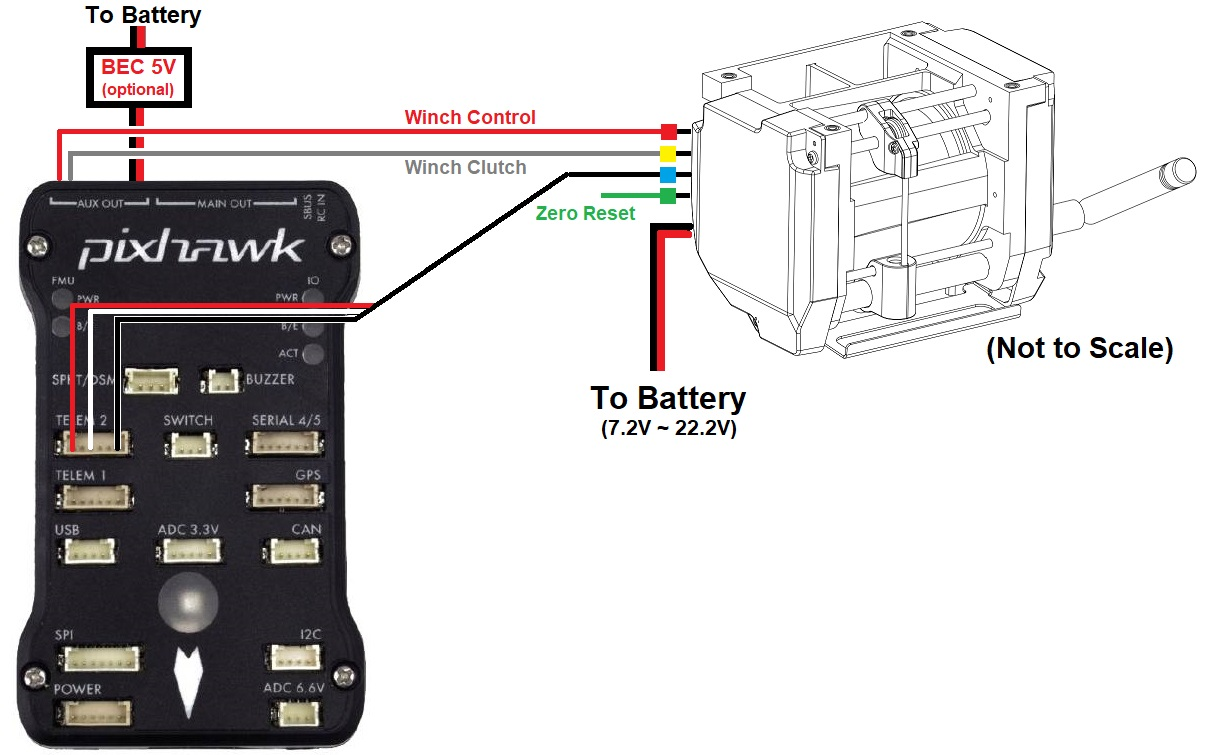
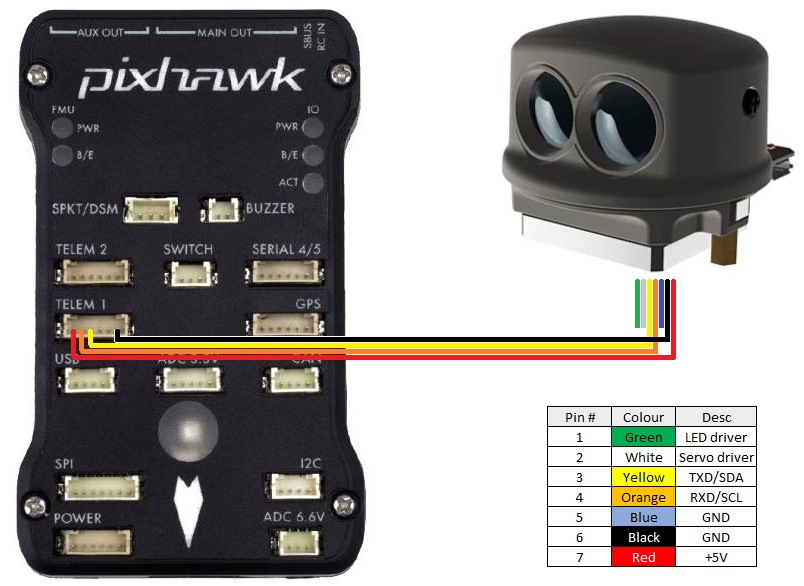
(32)测距仪(声纳、激光雷达、深度摄影机)
文章目录
前言
32.1 单向测距仪
32.2 全向性近距离测距仪
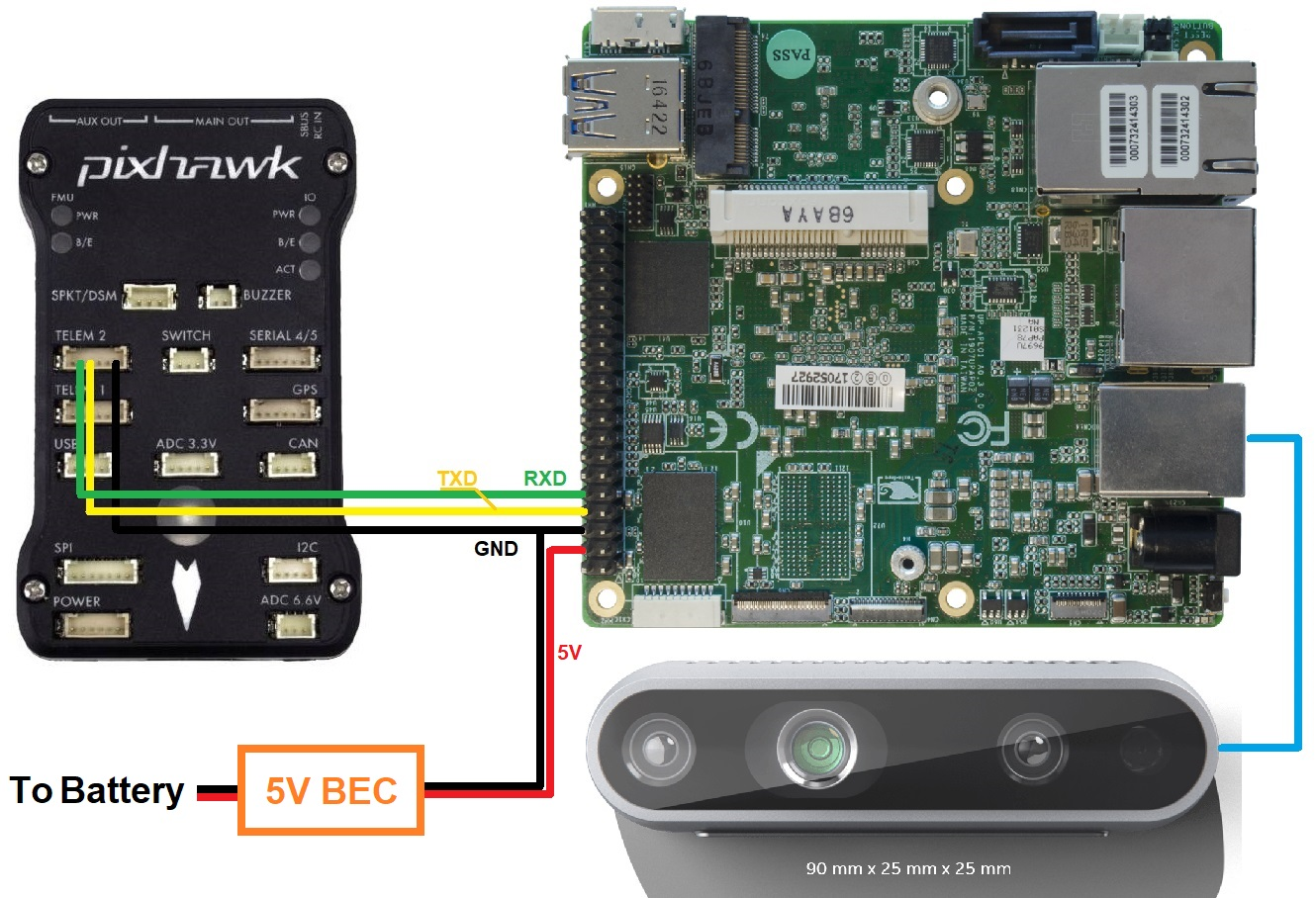
32.3 基于视觉的传感器 前言
旋翼飞机/固定翼/无人车支持多种不同的测距仪,包括激光雷达(使用激光或红外线光束进行距离测量)、360 度激光雷达(可探测多个方向的障碍…

ArduPilot开源飞控之AP_Mission
ArduPilot开源飞控之AP_Mission 1. 源由2. AP_Mission类3 简令结构3.1 导航相关3.1.1 jump command3.1.2 condition delay command3.1.3 condition distance command3.1.4 condition yaw command3.1.5 change speed command3.1.6 nav guided command3.1.7 do VTOL transition3.…

ArduPilot开源飞控之Companion Computers简单分析
ArduPilot开源飞控之Companion Computers简单分析 1. 源由2. 伴机系统2.1 APSync2.2 DroneKit2.3 FlytOS2.4 Maverick2.5 ROS2.6 Rpanion-server 3. 总结4. 参考资料 1. 源由
从稳定性,社区群体,以及开源方式的角度看,Ardupilot是不错的选择…
ardupilot开发 --- 起飞前后 篇
起飞前检查
电机响应是否正确(转向)姿态响应是否正常(roll pitch yaw)GPS数据是否正常(星数,RTK信号)电源电压安全开关安全检测(armed pre check)
起飞前的必调参数 机…

ardupilot开发 --- 风机不停机巡检 篇
在哪里创建的siyi实例? 如何传递飞控的时间戳给siyi相机? AP_RTC_ENABLED在waf编译时配置为1?? 如何配置?
在lua脚本中如何获取这个时间AP::rtc().get_utc_usec(utc_usec)??? inclu…

(1)(1.9) MSP (version 4.2)
文章目录
前言
1 协议概述
2 配置
3 参数说明 前言
ArduPilot 支持 MSP 协议,可通过任何串行端口进行遥测、OSD 和传感器。这样,ArduPilot 就能将遥测数据发送到 MSP 兼容设备(如大疆护目镜),用于屏幕显示&#x…
ArduPilot开源飞控之AP_Camera
ArduPilot开源飞控之AP_Camera 1. 源由2. 框架设计2.1 启动代码2.2 任务代码 update2.3 任务代码 handle_message2.4 任务代码 handle_command_long 3. 重要例程3.1 init3.2 update3.3 handle_message3.4 handle_command_long 4 总结5. 参考资料 1. 源由
通常民用无人机上有两…
(1)(1.13) SiK无线电高级配置(七)
文章目录
前言
17 技术细节
18 名词解释 前言
本文提供 SiK 遥测无线电(SiK Telemetry Radio)的高级配置信息。它面向"高级用户"和希望更好地了解无线电如何运行的用户。 17 技术细节 在评估该无线电是否符合当地法规时,了解其使用的技术可能会有所帮…
ardupilot开发 --- ROS 与 Ardupilot 篇
1. ROS 与 Ardupilot
ArduPilot功能可以通过ROS进行扩展;推荐使用ROS Noetic 版本,而非ROS2;对于ROS2,目Humble是唯一支持的ROS2版本;
2. ROS with SITL
系统环境:win11,wsl2,Ubu…

ArduPilot开源代码之Aocoda-RC F405V2 Mark4 7“ PNP适配
ArduPilot开源代码之Aocoda-RC F405V2 Mark4 10"适配 1. 源由2. 安装2.1 Installing Ground Station (GCS) software2.2 Autopilot System Assembly Instructions2.3 Loading Firmware2.4 Connect Mission Planner to AutoPilot 3. 配置3.1 Basic System Overview3.2 Fram…

(7)(7.1) 使用航点和事件规划任务
文章目录
前言
7.1.1 设置Home位置
7.1.2 视频:制作并保存多路点任务
7.1.3 视频:加载已保存的多航点任务
7.1.4 使用说明
7.1.5 提示
7.1.6 自动网格
7.1.7 任务指令
7.1.8 任务结束
7.1.9 任务重置
7.1.10 MIS_OPTIONS
7.1.11 任务再出发 …

Ardupilot开源飞控之VTOL之旅:配件规格
Ardupilot开源飞控之VTOL之旅:配件规格 1. 源由2. 飞控板 Aocoda-RC H743Dual3. PDB分电板 Aocoda-RC PDB30604. GPS BN8805. 摄像头 RunCam 1200TVL6. 模拟图传 JHEMCU RuiBet Tran-3016W 5.8GHZ 1.6W7. 打印件7.1 飞控/GPS座子7.2 VTX/天线座子7.3 接收机天线座 8…
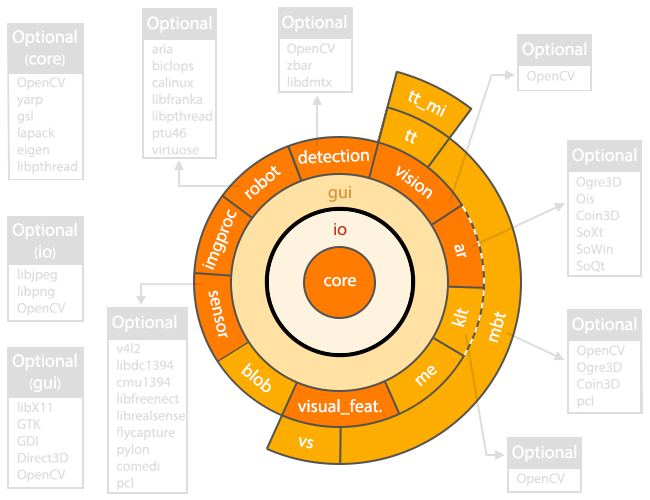
ArduPilot开源飞控系统之简单介绍
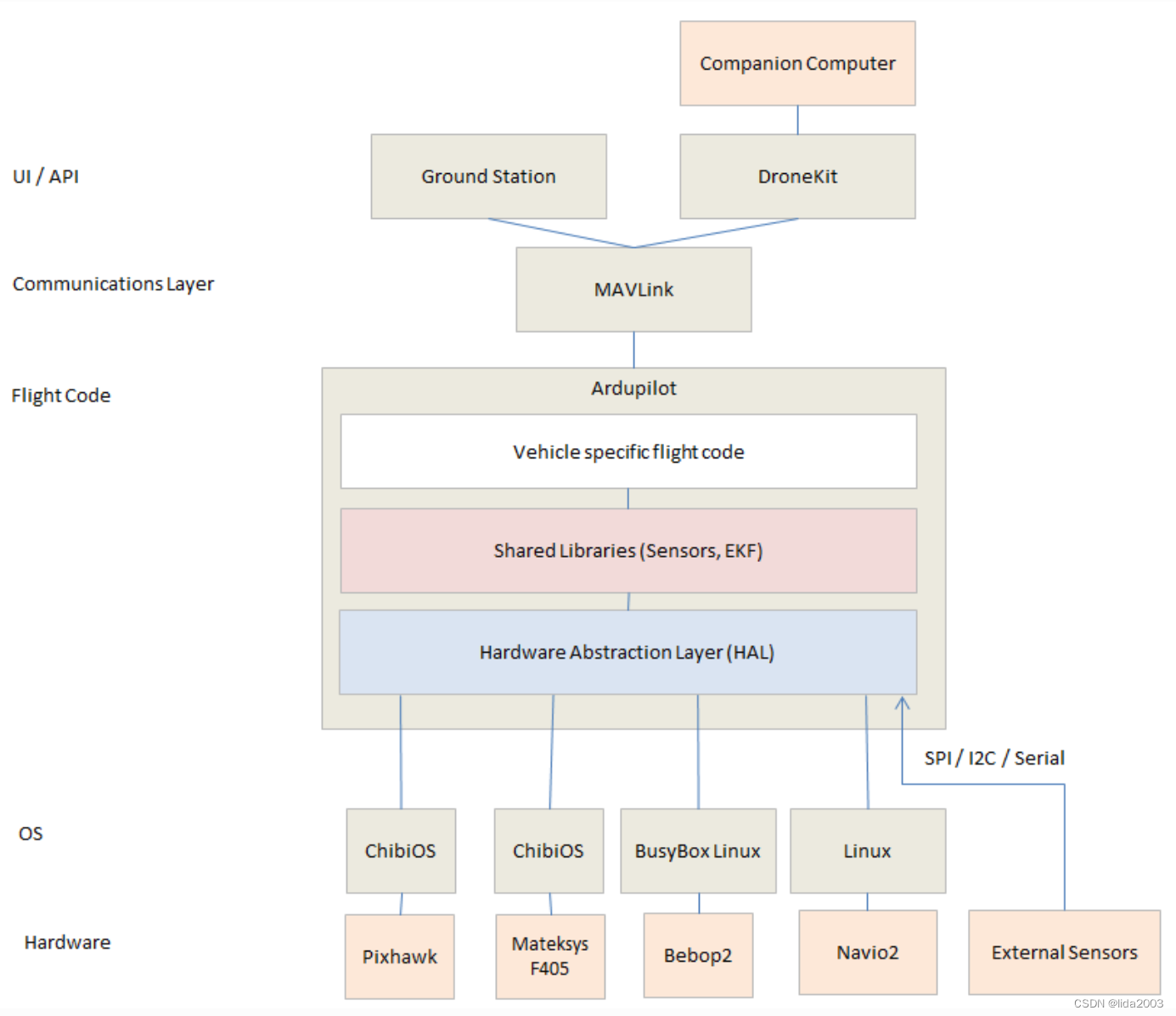
ArduPilot开源飞控系统之简单介绍1. 源由2. 了解&阅读2.1 ArduPilot历史2.2 关于GPLv32.3 ArduPilot系统组成2.4 ArduPilot代码结构3. 后续4. 参考资料ArduPilot是一个可信赖的自动驾驶系统,为人们带来便利。为此,提供了一套全面的工具,几…
ardupilot参数的mavlink实现
专业名词释义,参数缩写 gimbal 云台,万向接头 failsafe 故障保护 Collective: 总距 Swashplate : 倾斜盘 SW: Swashplate 倾斜盘 RSC: Rotor Speed Control RC: Radio Channel 无线通道 DDFP&am…
(1)(1.11) SiK Radio v2(一)
文章目录
前言
1 概述
2 特点
3 状态LED灯 前言
SiK 遥测无线电是在自动驾驶仪和地面站之间建立遥测连接的最简单方法之一。本文提供了如何连接和配置无线电的基本用户指南。 3DR Radio v2(SiKRadio 的消费者版本)
!Note
本页面以前的…

(6)(6.2) 任务命令
文章目录 前言
6.2.1 概述
6.2.2 导航命令
6.2.3 条件命令
6.2.4 DO命令 前言
本文介绍了 Copter、Plane 和 Rover 切换到自动模式时支持的任务指令。
!Warning
这是一项正在进行中的工作,尚未经过全面审核。有关 Copter 的更佳列表,请…
ArduPilot Kakute F7 AIO DIYF450 without GPS配置
ArduPilot Kakute F7 AIO DIYF450 without GPS配置1. 源由2. 配置2.1 Kakute F7 AIO相关配置2.1.1 串口规划2.1.2 电传配置2.1.3 GPS配置2.1.4 CRSF接收机配置2.1.5 Compass配置2.1.6 电机配置2.1.7 TX12 遥控器配置3. 实测效果4. 参考资料1. 源由
鉴于GPS模块信号质量未达标&…

(1)(1.8) MSP(MultiWii 串行协议)(4.1 版)
文章目录
前言
1 协议概述
2 配置
3 参数说明 前言
ArduPilot 支持 MSP 协议,可通过任何串行端口进行遥测和传感器。这允许 ArduPilot 将其遥测数据发送到 MSP 兼容设备(如大疆护目镜),用于屏幕显示(OSDÿ…
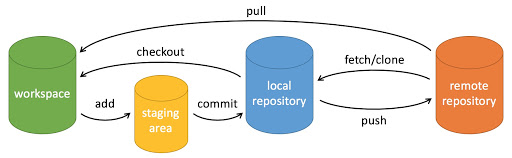
ardupilot开发 --- git 篇
一些概念
工作区:就是你在电脑里能看到的目录;暂存区:stage区 或 index区。存放在 :工作区 / .git / index 文件中;版本库:本地仓库,存放在 :工作区 / .git 中 关于 HEAD 是所有本地…
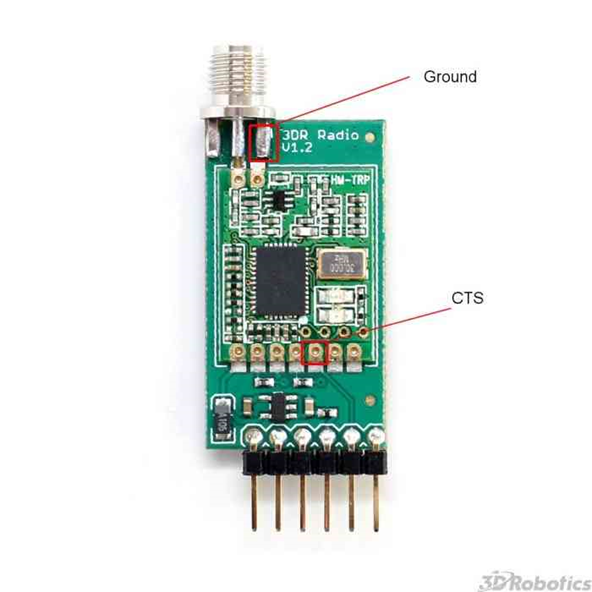
(1)(1.13) SiK无线电高级配置(六)
文章目录
前言
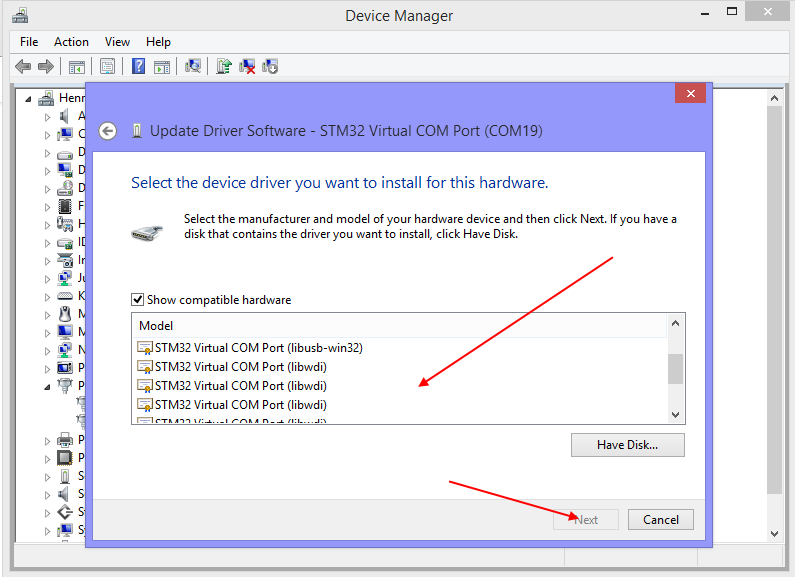
15 使用FTDI转USB调试线配置SiK无线电设备
16 强制启动加载程序模式
17 名词解释 前言 本文提供 SiK 遥测无线电(SiK Telemetry Radio)的高级配置信息。它面向"高级用户"和希望更好地了解无线电如何运行的用户。 15 使用FTDI转USB调试线配置SiK无线…
ardupilot开发 --- 机载(边缘)计算机-VISP 篇
啊啊啊我的妻王氏宝钏 1. 一些概念2. 支持的硬件3. 支持的第三方库4. 安装4.1 快速安装VISP4.2 第三方库的(可选)安装 5. 下载测试数据6. tips7. 如何在应用程序中使用(引用)VISP?8. 帮助文档8.1 基本的线性代数运算8.2 图像操作 1. 一些概念
什么是VISP VISP即Vis…

ardupilot开发 --- ROS 篇
0. 前言
关于机载计算机; 关于ROS; 关于基于ROS的视觉SLAM和避障;
1. APSync
说到机载计算机Companion computer就不得不提另一个关键词APSync;APSync简化了机载计算机的设置,以便它可以为ArduPilot提供额外的功能,…
ardupilot开发 --- ardupilot parameter与mavlink massage篇
关系
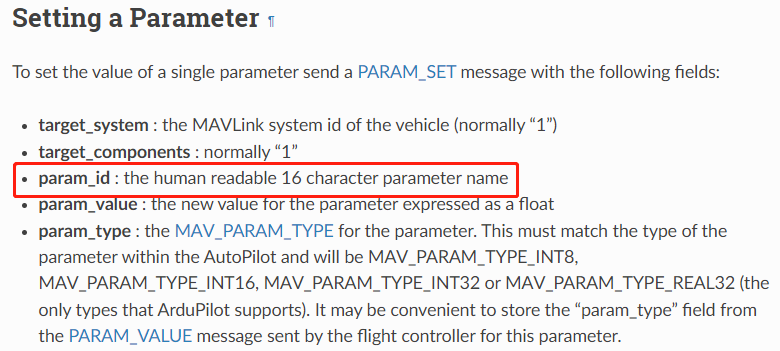
除了可以再初始化设置外,ardupilot parameters一般通过mavlink massage来动态设置;
ardupilot parameter
https://ardupilot.org/copter/docs/parameters.html
mavlink massage
https://mavlink.io/en/messages/common.html
mavlink massage是…

(2)(2.9) Holybro Microhard P900无线电遥测设备
文章目录
前言
1 特点
2 规格
3 包装内包括 前言
Holybro Microhard Radio 集成了 microhard Pico 系列射频模块,能够在强大的拓扑结构中提供高性能无线串行通信,如点对点、点对多点和安全 Mesh(P840 不提供 Mesh)。 它采用跳…
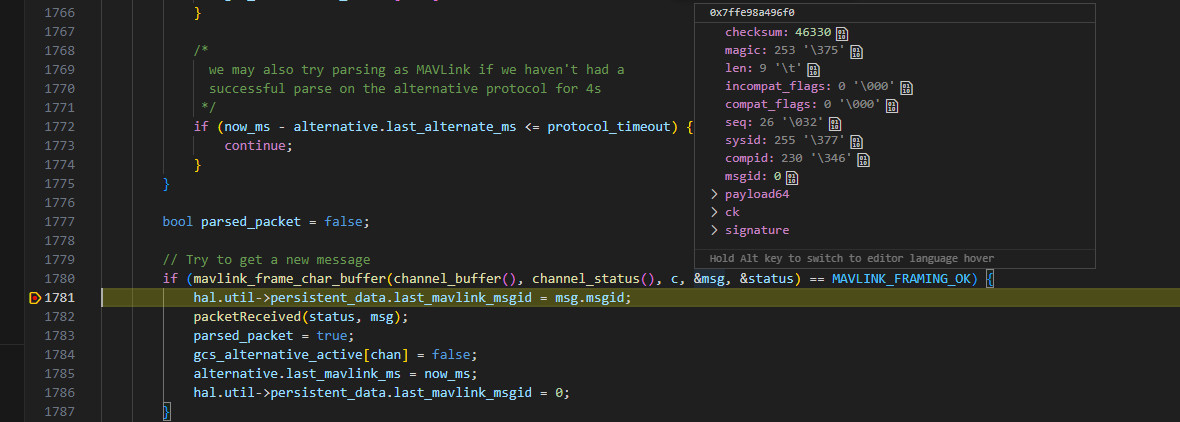
ardupilot开发 --- 代码解析 篇
0. 前言
根据SITL的断点调试和自己阅读代码的一些理解,写一点自己的注释,有什么不恰当的地方请各位读者不吝赐教。
1. GCS::update_send 线程
主动向MavLink system发送消息包。
1.1 不断向地面站发送飞机状态数据
msg_attitude: msg_location: n…
(15)第一人称视角视频
文章目录 前言
15.1 推荐的零件
15.2 连接图示
15.3 通过任务计划器最小化OSD设置
15.4 集成式OSD
15.5 用户视频/博客
15.6 与FPV飞行特别相关的安全警告
15.7 政府/地方法规 前言
第一人称视角在飞行时为你提供了真正的飞行员视角,它将视频摄像机和发射器…

(6)蜂鸣器(又称音调报警)
文章目录
6.1 使用有源蜂鸣器而不是无源蜂鸣器
6.2 安装蜂鸣器
6.3 使蜂鸣器安静 蜂鸣器(或音调报警器)可用于以声音指示飞行器的状态变化。根据电路板的能力,它可以是一个有源设备(只需要施加电压来产生一个单一频率的音调&am…
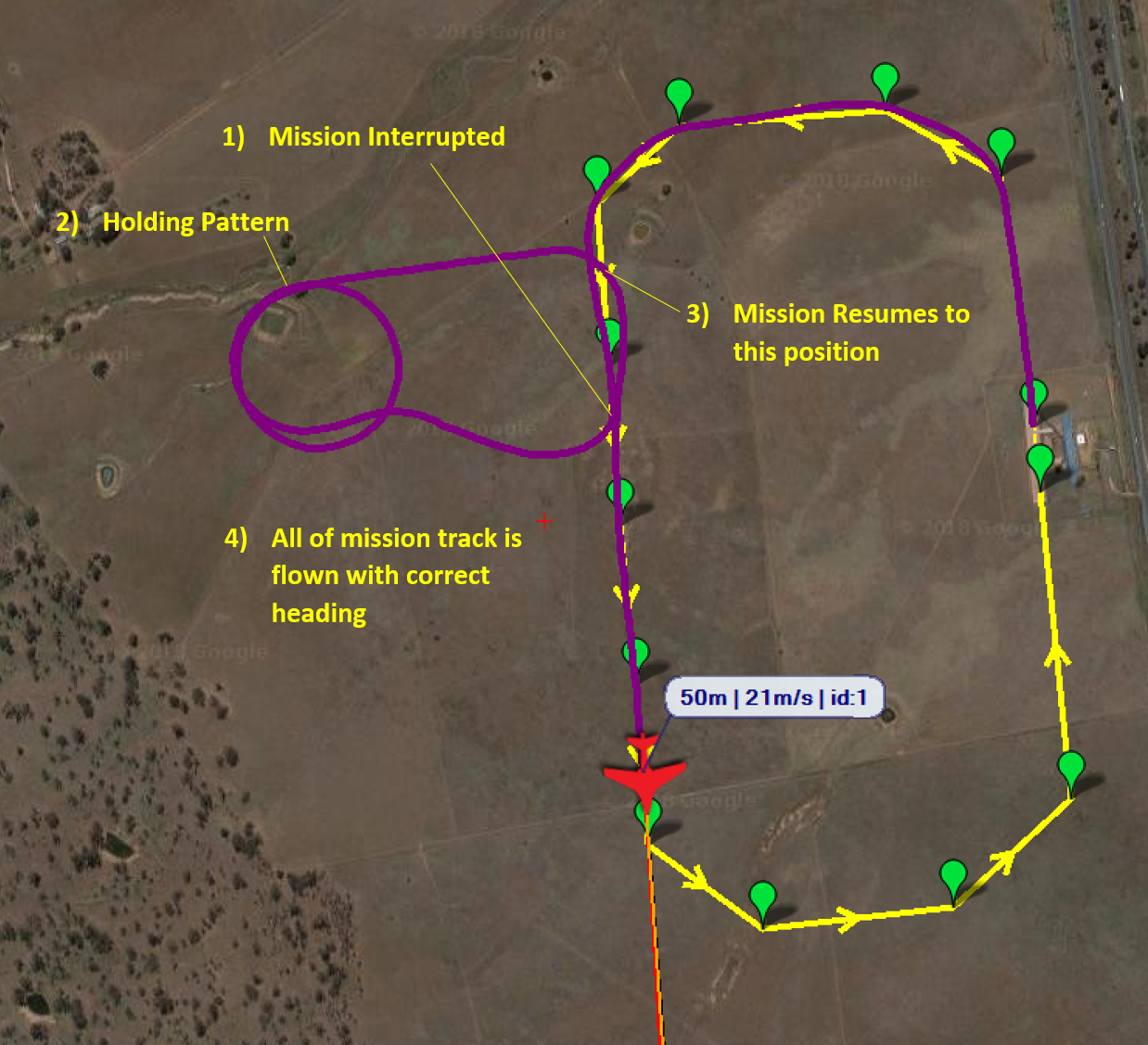
(6)(6.6) 恢复任务回放
文章目录
前言
6.6.1 配置
6.6.2 工作原理
6.6.3 局限性 前言
本页介绍了什么是"任务继续时后退"功能以及如何使用该功能。
!Note
从 4.1 版起,Plane、Copter 和 Rover 均可使用此功能。 在某些应用或运行区域,为了消除冲突…
ArduPilot飞控启动运行过程简介
ArduPilot飞控启动&运行过程简介 1. 源由2. Copter飞控2.1 入口2.3 运行(main_loop) 3. Ardunio编程3.1 setup - AP_Vehicle::setup3.2 loop - AP_Vehicle::loop 4. ArduCopter任务5. 参考资料 1. 源由
ArduPilot从整体的设计框架角度,感觉是更加容易上手&…
ArduPilot开源代码之AP_InertialSensor_Backend
ArduPilot开源代码之AP_InertialSensor_Backend 1. 源由2. 设计3. 实例BMI2703.1 AP_InertialSensor_BMI2703.2 probe3.3 init3.4 start3.5 read_fifo3.6 update 4. 总结5. 参考资料 1. 源由
惯性传感器是飞控关于姿态最重要的一个传感器。从复杂度角度看,除了数据…
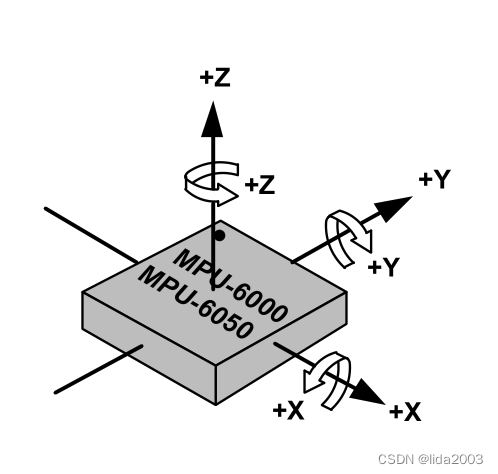
APM/PX4/betaflight/inav开源飞控之IMU方向
APM/PX4/betaflight/inav开源飞控之IMU方向 1. 源由2. 坐标系2.1 APM/PX4:机体坐标 右手系规则2.2 betaflight/inav:xEast-yNorth-zUp yaw反向 右手系规则 3. 转向定义3.1 APM/PX43.2 betaflight/inav 4. 实例4.1 I C M 42688 P ICM42688P ICM42688P…

ardupilot开发 --- 避障方案、SLAM方案探索 篇
0. 无意间发现一张好看的图 1. 无人机避障技术
目前,无人机的避障技术中最为常见的是红外线传感器、超声波传感器、激光传感器以及视觉传感器。那为什么大疆的前视避障首先选择了双目视觉呢?
红外线传感器超声波传感器激光传感器视觉传感器。
参考&am…

ardupilot开发 --- External LEDs篇
概述
夜航灯,LED状态灯,显示飞机当前状态; 支持的连接方式:
I2C for external LED or RGB LEDs I^2C总线连接;SERVOx_FUNCTION for serially programmed device 串行连接;CANBUS for DroneCAN LEDs CAN总…
(6)(6.3) 复合连接的故障处理
文章目录
6.3 复合连接的故障处理
6.4 相关话题 6.3 复合连接的故障处理
带有 F7 或 H7 处理器并有 CAN 接口的自动驾驶仪使用的固件提供两个 USB 接口。一个用于正常的 MAVLink 连接,一个用于 SLCAN 串行连接到 CAN 接口进行配置和固件更新。这被称为复合型 USB…

ArduPilot开源代码之AP_Logger
ArduPilot开源代码之AP_Logger 1. 源由2. Logger类2.1 Copter初始化2.2 Copter任务 3. 实例理解3.1 Copter设备应用任务3.1.1 Copter::ten_hz_logging_loop3.1.2 Copter::twentyfive_hz_logging 3.2 AP_Logger应用类任务3.2.1 AP_Logger::periodic_tasks3.2.2 AP_Logger::io_th…
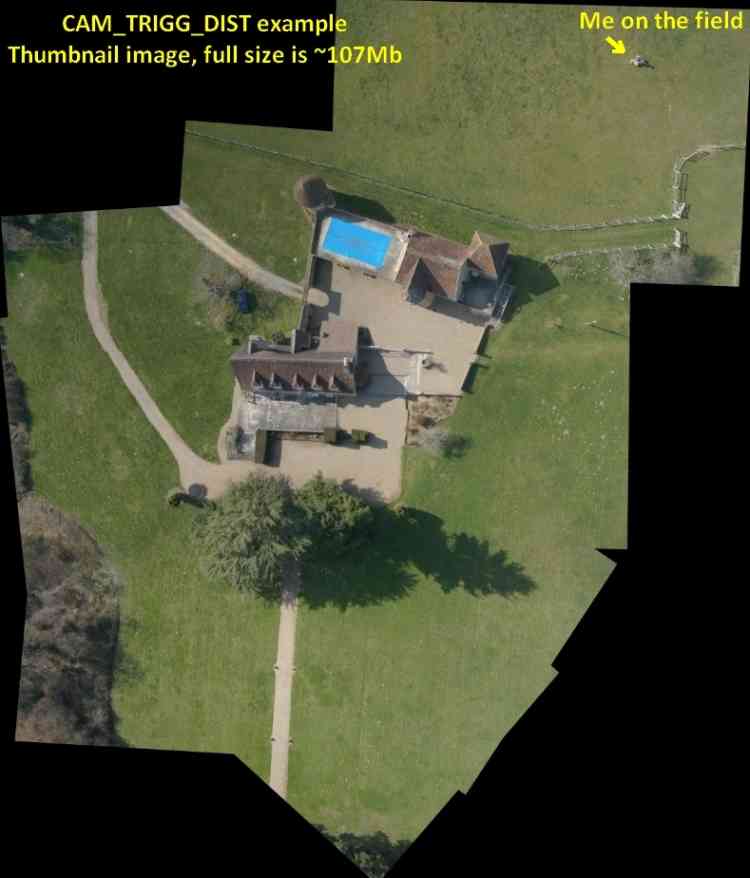
(6)(6.3) 自动任务中的相机控制
文章目录
前言
6.3.1 概述
6.3.2 自动任务类型
6.3.3 创建合成图像 前言
本文介绍 ArduPilot 的相机和云台命令,并说明如何在 Mission Planner 中使用这些命令来定义相机勘测任务。这些说明假定已经连接并配置了相机触发器和云台(camera trigger and gimbal ha…
ArduPilot开源飞控之AP_OpticalFlow
ArduPilot开源飞控之AP_OpticalFlow 1. 源由2. 框架设计2.1 启动代码2.2 任务代码 update2.3 任务代码 handle_msg2.4 任务代码 handle_msp2.5 任务代码 do_aux_function 3. 重要例程3.1 AP_OpticalFlow3.2 init3.3 update3.4 handle_msg3.5 handle_msp3.6 start_calibration3.…
ardupilot开发 --- 坐标系篇
提出问题 解决问题
你是否对飞控中的坐标变换很迷惑?地面系?机体系?NED?NEU?极坐标系?经纬度? 飞机的lean角?欧拉角?四元素? 他们之间有什么关系?…
(8)(8.8) CAN总线设置
文章目录 前言
1 概述
2 配置设置
3 CAN ESCs 前言
本文展示了如何设置 CAN 总线,以及用户有哪些选项来完成适合其特定需求的设置。
!
ArduPilot开源飞控之AP_InertialNav
ArduPilot开源飞控之AP_InertialNav 1. 源由2. 调用关系3. 重要例程3.1 read_inertia3.2 update 4. 封装接口4.1 get_filter_status4.2 get_position_neu_cm4.3 get_position_xy_cm4.4 get_position_z_up_cm4.5 get_velocity_neu_cms4.6 get_velocity_xy_cms4.7 get_speed_xy_c…

(1)(1.13) SiK无线电高级配置(五)
文章目录
前言
10 可用频率范围
11 DUTY_CYCLE 设置
12 低延迟模式
13 先听后说 (LBT)
14 升级无线电固件
15 MAVLink协议说明 前言 本文提供 SiK 遥测无线电(SiK Telemetry Radio)的高级配置信息。它面向"高级用户"和希望更好地了解无线电如何运行的用户。 1…
(2)(2.11) RFD900
文章目录
前言
1 概述
2 主要功能
3 状态LED指示灯
4 接口
5 使用Mission Planner进行配置
6 支持不同国家/地区
7 讨论论坛 前言
RFD900 无线电调制解调器是一款高功率 900Mhz ISM 波段无线电调制解调器,设计用于远距离串行通信。据报道,其通信…
(3)(3.5) 遥测无线电区域条例
文章目录
前言
1 支持不同国家/地区 前言
本专题列出了每个国家/地区可用的主要频率,并列出了无线电设备。
!Note
合规是你的责任。检查无线电是否符合所在地区/国家的频率、跳频信道和功率级别规定。 !Tip
我们很乐意在此表中添加更多…
(1)(1.4) ESP32 wifi telemetry
文章目录
前言
1 用于ESP32的DroneBridge
2 推荐的硬件
3 下载和烧录固件
4 为ESP32配置DroneBridge 前言
ESP32 是现成的 Wi-Fi 模块,具有完整的 TCP/IP 协议栈和微控制器功能。它们提供专用的 UART、SPI 和 I2C 接口。它们可与任何 ArduPilot 自动驾驶控制器…

(1)(1.12) LeddarTech LeddarVu8
文章目录
前言
1 连接到自动驾驶仪
2 参数说明 前言
LeddarTech LeddarVu8 是一款长距离(185m)激光雷达,可在 16 度至 99 度视场范围内提供 8 个单独的距离,具体取决于所使用的型号。ArduPilot 始终使用所提供的 8 个距离中最…

(2)(2.13) Rockblock Satellite Modem
文章目录
前言
1 支持的MAVLink命令信息
2 设置
3 使用方法
4 数据成本
5 参数 前言
!Note
该功能仅适用于 ArduPilot 4.4 或更高版本,并且要求飞行控制器支持 LUA 脚本(LUA Scripts)。 RockBLOCK 卫星调制解调器可实现与 ArduPilot 飞行器的全球…

ardupilot开发 --- 远程标识 篇
1. wifi协议
https://zhuanlan.zhihu.com/p/660568077
AP 无线接入点 路由器STA 站点 接入路由器的终端SSID 标识符 无线网络的名称信标祯 Beacon AP通过广播Beacon祯来告诉想要接入者(STA)无线网络的信息,如SSIDWLAN数据帧 Wi-Fi网络中传输数据时所使用的数据帧格…

Ardupilot — AP_OpticalFlow代码梳理
文章目录
前言
1 Copter.cpp
1.1 void Copter::setup()
2 system.cpp
2.1 void Copter::init_ardupilot()
3 sensors.cpp
3.1 void Copter::init_optflow()
3.2 对象optflow说明
4 OpticalFlow.cpp
4.1 void OpticalFlow::init(uint32_t log_bit)
5 AP_OpticalFlow_…
(4)(4.3) Kogger Sonar
文章目录
前言
1 推荐硬件
2 配置回声探测仪模块
3 连接ArduPilot硬件
4 参数说明 前言
KOGGER 声纳(KOGGER Sonar)是一款结构紧凑、成本低廉的水下回声测深仪模块,带有 UART 接口,电源电压为 5-14v。 1 推荐硬件 CP210x USB->UART 转换器和安装…
ardupilot开发 --- MAVSDK 篇
概述
MAVSDK是各种编程语言的库集合,用于与MAVLink系统(如无人机、相机或地面系统)接口。这些库提供了一个简单的API,用于管理一个或多个车辆,提供对车辆信息和遥测的程序访问,以及对任务、移动和其他操作…

(2)(2.14) SPL Satellite Telemetry
文章目录
前言
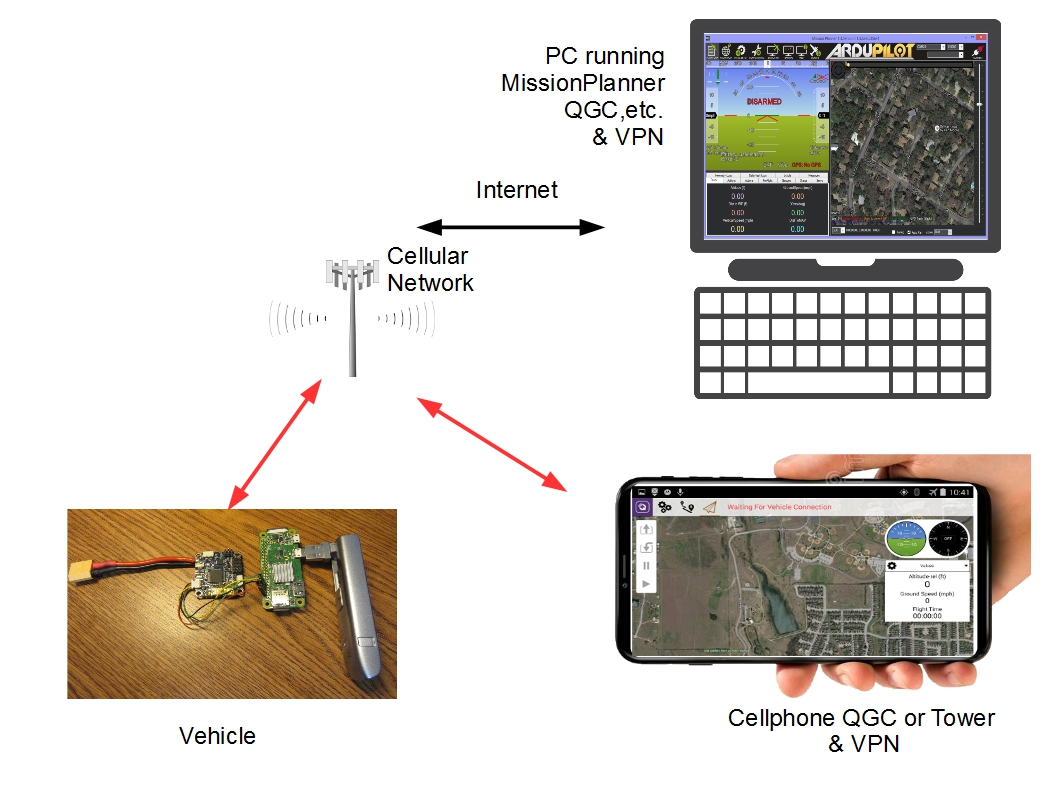
1 本地 Wi-Fi(费用:30 美元以上,范围:室内)
2 蜂窝电话(费用:100 美元以上,范围:蜂窝电话覆盖区域)
3 手机卫星(费用ÿ…

ardupilot开发 --- 外设适配器、拓展外设、AP_Periph、DroneCAN 、UAVCAN 篇
什么是外设适配器,为什么要拓展外设?
飞控的外设接口有限,如串口只有8个,I^2C只有一个,CAN口只有一个,这些接口数量如果不能满足预期的传感器数量,那么就需要对这些接口进行拓展,外…
ArduPilot之开源代码UARTs and the Console使用
ArduPilot之开源代码UARTs and the Console使用 1. 源由2. UART定义2.1 HAL_Empty2.2 HAL_ChibiOS2.3 HAL_ESP322.4 HAL_Linux2.5 HAL_SITL 3. 配置参数3.1 SERIALx_BAUD3.2 SERIALx_PROTOCOL3.3 SERIALx_OPTIONS3.4 SERIAL_PASSx3.5 SERIAL_PASSTIMO 4. UART常用函数5. 示例代…
(1)(1.7) HOTT telemetry
文章目录
前言
1 布线和设置
2 参数说明 前言
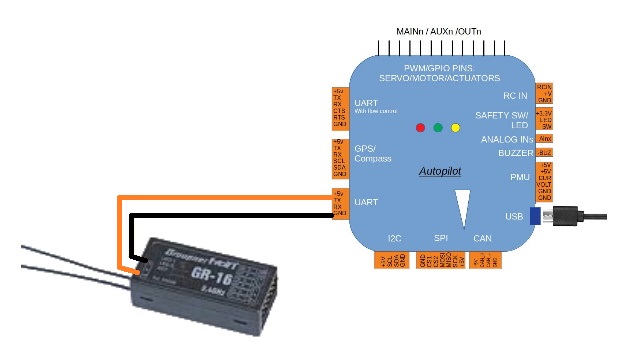
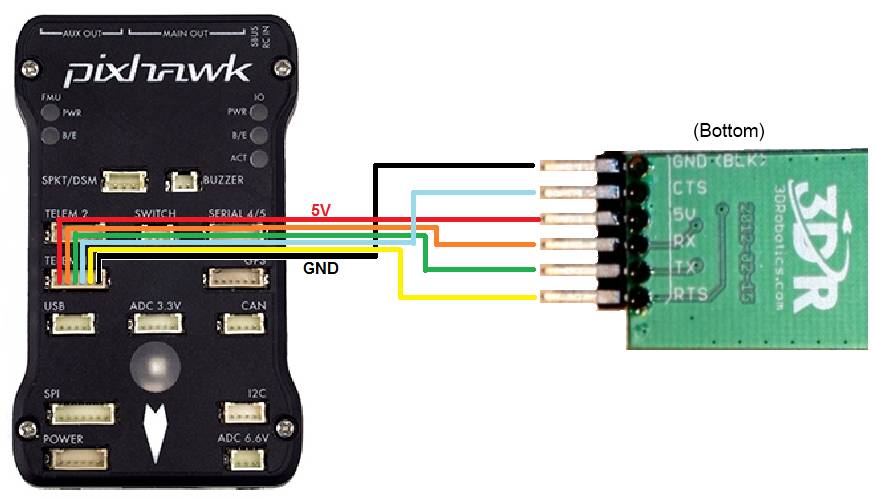
Plane-4.0.0(及更高版本)、Copter-4.0.4(及更高版本)和 Rover-4.1.0(及更高版本)支持 Graupner HOTT 遥测技术。 1 布线和设置
与自动驾驶仪的连接可通过…
(1)(1.1) Bluetooth
文章目录
前言
1 连接到自动驾驶仪
2 连接Mission Planner快速入门
3 与Mission Planner的详细连接
4 从安卓地面站连接
5 如何更改波特率、设备名称和设备密码
6 故障排除
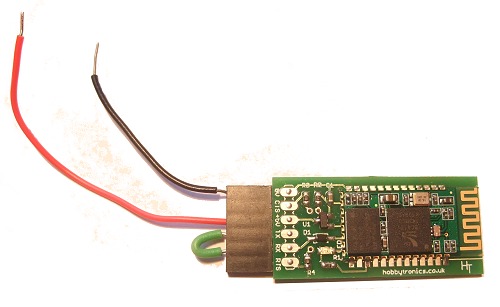
7 产品规格 前言
蓝牙数据链路(如 HC-06 模块)(HC-06 module)可用于将…

(2)(2.4) TerraRanger Tower/Tower EVO(360度)
文章目录
前言
1 安装传感器并连接
2 通过地面站进行配置
3 参数说明 前言
TeraRanger Tower 可用于在 Loiter 和 AltHold 模式下进行目标规避。传感器的最大可用距离约为 4.5m。
TeraRanger Tower EVO 可用于在 Loiter 和 AltHold 模式下进行目标规避。传感器的最大可用…
ArduPilot开源飞控之AP_Compass
ArduPilot开源飞控之AP_Compass 1. 源由2. 框架设计2.1 启动代码2.2 任务代码 3. 重要例程3.1 init3.2 read3.3 _detect_backends3.4 _probe_external_i2c_compasses 4. 总结5. 参考资料 1. 源由
磁力计应该不是一个非常复杂的传感器,但是确实是一个非常重要的感知…

(3)(3.1) FlightDeck FrSky发射器应用程序
文章目录
前言
1 概述
2 Turnkey Packages
3 参数说明 前言
Craft and Theory 的 FlightDeck 可让你轻松查看飞行模式、高度、速度、姿态和关键系统警报,包括故障保护和电池错误,如电池不平衡警告和发射机低电量警报。 1 概述 Craft and Theory 的…
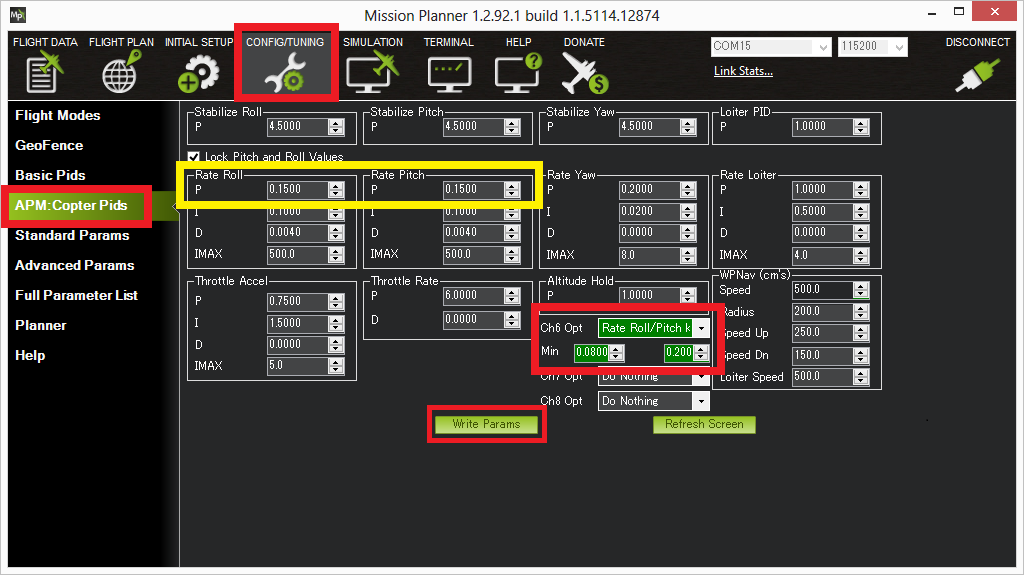
(9)基于发射器的调优
文章目录 前言
1 概述
2 调优值
3 用任务规划器设置 前言
你可以在飞行中使用你的遥控发射器进行广泛的参数调优。这是为那些无法使用自动调优功能的高级用户准备的,或者希望通过对每个参数的完全手动调优控制来进行微调。 1 概述
基于发射机的调优允许你在飞行…
ardupilot开发 --- handle_message 篇
mavlink 消息非常重要的几个函数:
解码:xxx_decode(&msg, &packet)handle_message 下面分析他们的调用、被调用逻辑: 如 AP_Camera::handle_message(chan, msg)) 调用AP_Camera_xx::handle_message(chan, msg) 谁调用了AP_Camera::h…


(2)(2.1) Andruav Android Cellular(一)
文章目录
前言
1 Andruav 是什么?
2 Andruav入门
3 Andruav FPV
4 Andruav GCS App 前言
Andruav 是一个基于安卓的互联系统,它将安卓手机作为公司计算机,为你的无人机和遥控车增添先进功能。 1 Andruav 是什么ÿ…
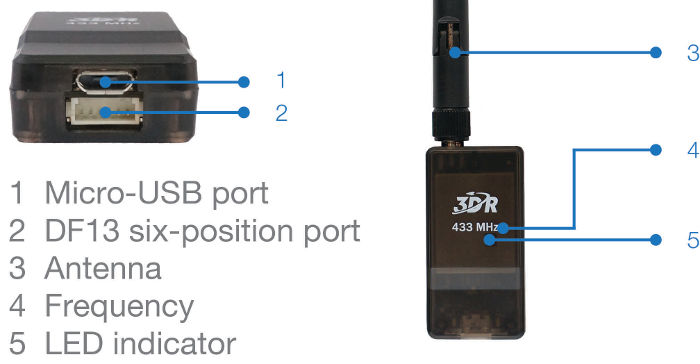
(1)(1.10) SiK Radio v1
文章目录
前言
1 概述
2 连接无线电台
3 参数说明 前言
本文介绍了如何将 3DR Radio v1 连接到飞行控制器。你还应阅读 SiK Radio v2,其中包含更详细的用户指南和功能列表。 1 概述
3DR 无线电设备是在自动驾驶仪和地面站之间建立遥测连接的最简单方法。
3DR…
ArduPilot开源飞控之AP_Relay
ArduPilot开源飞控之AP_Relay 1. 源由2. 框架设计2.1 启动代码2.2 任务代码2.2.1 AP_Camera_Relay::update2.2.2 AP_Parachute::update2.2.3 MAVLink命令 3. 重要例程3.1 AP_Relay::AP_Relay3.2 AP_Relay::init3.3 AP_Camera_Relay::update3.4 AP_Parachute::update3.5 AP_Para…
ArduPilot开源飞控之AP_Mount
ArduPilot开源飞控之AP_Mount 1. 源由2. 框架设计2.1 启动代码2.2 任务代码 update2.3 任务代码 update_fast2.4 任务代码 handle_message 3. 重要例程3.1 init3.2 update3.3 update_fast3.4 handle_message 4. 总结5. 参考资料 1. 源由
AP_Mount主要是挂的云台设备࿰…
ArduPilot开源飞控之Copter任务
ArduPilot开源飞控之Copter任务 1. 源由2. 整体分析3. 必须任务3.1 FAST_TASK_CLASS(AP_InertialSensor, &copter.ins, update)3.2 FAST_TASK(run_rate_controller)3.3 FAST_TASK(motors_output)3.4 FAST_TASK(read_AHRS)3.5 FAST_TASK(read_inertia)3.6 FAST_TASK(check_e…
ArduPilot之MissionPlanner姿态显示界面异常
ArduPilot之MissionPlanner姿态显示界面异常 1. 源由2. 重现3. 分析4. 总结 1. 源由
ArduPilot地面控制站MissionPlanner姿态显示异常 飞控启动直接接MP,姿态无法跟随飞控进行相应的变化;QGC先连接飞控,然后使用MP连接,一些正常&…
ArduPilot开源代码之AP_RCProtocol_CRSF
ArduPilot开源代码之AP_RCProtocol_CRSF 1. 源由2. 设计3. 初始&运行3.1 初始化3.2 运行 4. 重要方法4.1 uint32_t get_bootstrap_baud_rate()4.2 AP_RCProtocol_CRSF(AP_RCProtocol &_frontend)4.3 void process_handshake(uint32_t baudrate)4.4 void process_byte(u…
ArduPilot开源代码之RCInput
ArduPilot开源代码之RCInput 1. 源由2. RCInput模块入口2.1 模块初始化2.2 任务线程 3. RCInput模块重要实现3.1 常规定义3.2 H743飞控默认3.3 RCInput::init3.4 RCInput::_timer_tick 4. 总结5. 参考资料 1. 源由
对航模的控制方法中最为直接的是通过遥控器RC进行控制。当然除…
(7)(7.6) 恢复任务回放
文章目录 前言
7.6.1 配置
7.6.2 工作原理
7.6.3 局限性 前言
本页介绍了什么是"任务继续时后退"功能以及如何使用该功能。
!Note
从 4.1 版起,Plane、Copter 和 Rover 均可使用此功能。 在某些应用或运行区域,为了消除冲突&…
ArduPilot开源飞控之AP_Baro_DPS310/AP_Baro_DPS280
ArduPilot开源飞控之AP_Baro_DPS310/AP_Baro_DPS280 1. 源由2. back-end抽象类3. DPS310/DPS280芯片差异4. 方法实现4.1 probe4.2 init4.3 update4.4 timer 5. 参考资料 1. 源由
鉴于ArduPilot开源飞控之AP_Baro中涉及Sensor Driver有以下总线类型:
I2CSerial UAR…
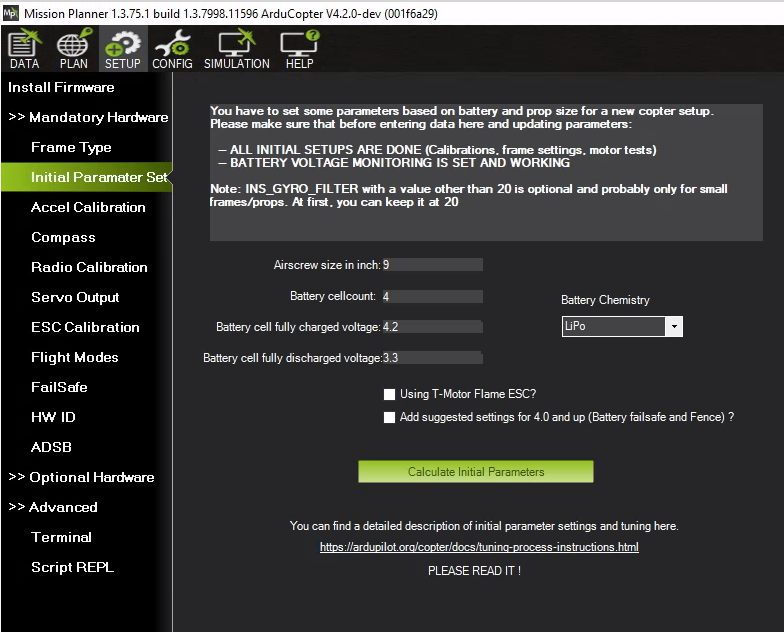
我的创作纪念日(2)设置飞机进行调优
文章目录 前言
2.1 电池设置
2.2 电机设置
2.3 PID控制器初始设置 前言
以下参数应根据你的飞机的规格正确设置。每一个都会影响调优过程的质量。 2.1 电池设置
确保你的 VTOL 电机的推力曲线尽可能的线性是非常重要的。一个线性的推力曲线意味着电机产生的实际推力的变化…
ArduPilot开源飞控之AP_Baro_ExternalAHRS
ArduPilot开源飞控之AP_Baro_ExternalAHRS 1. 源由2. back-end抽象类3. 方法实现3.1 AP_Baro_ExternalAHRS3.2 update3.3 handle_external3.4 Serial port 4. 参考资料 1. 源由
鉴于ArduPilot开源飞控之AP_Baro中涉及Sensor Driver有以下总线类型:
I2CSerial UART…
(7)(7.3) 自动任务中的相机控制
文章目录 前言
7.3.1 概述
7.3.2 自动任务类型
7.3.3 创建合成图像 前言
本文介绍 ArduPilot 的相机和云台命令,并说明如何在 Mission Planner 中使用这些命令来定义相机勘测任务。这些说明假定已经连接并配置了相机触发器和云台(camera trigger and gimbal hav…

ardupilot开发 --- 位置控制篇
几个疑问
如何根据GPS定位信息进行位置控制? 经纬度海拔高度如何转成导航坐标系? 飞控中的航迹点waypoint是基于那个坐标系的点?导航坐标系? Home点?导航坐标系的原点?电机解锁时的点?xyz&…
ardupilot开发 --- 外设适配器、外设拓展、AP_Periph 篇
什么是外设适配器,为什么要拓展外设?
AP_Periph: ArduPilot Peripheral
ArduPilot开源飞控之AP_Baro_MSP
ArduPilot开源飞控之AP_Baro_MSP 1. 源由2. back-end抽象类3. 方法实现3.1 AP_Baro_MSP3.2 update3.3 handle_msp3.4 MSP UART port 4. 参考资料 1. 源由
鉴于ArduPilot开源飞控之AP_Baro中涉及Sensor Driver有以下总线类型:
I2CSerial UARTCANSITL //模拟传感器(…

ardupilot开发 --- 仿真篇
环境
安装wsl2,win11自带wsl,win10需要安装;git clone ardupilot 源码;安装 Linux下的build环境;安装 flightgear(非必须) sudo apt-get install flightgearbuild 想要仿真的载具类型ÿ…
ArduPilot开源飞控之AP_Baro
ArduPilot开源飞控之AP_Baro 1. 源由2,框架设计2.1 启动代码2.2 任务代码 AP_Baro::update2.3 任务代码 AP_Baro::accumulate2.4 任务代码 AP_TempCalibration::update 3. 重要例程3.1 AP_Baro::calibrate3.2 AP_TempCalibration3.2.1 AP_TempCalibration::setup_le…

ardupilot开发 ---测试mav_cmd篇
参考
https://ardupilot.org/dev/docs/mavlink-commands.html
通过 COMMAND_LONG 和 COMMAND_INT 发送 MAV_CMD
COMMAND_LONG消息格式: COMMAND_INT消息格式: https://mavlink.io/en/messages/common.html#COMMAND_LONG
响应:
测试
…
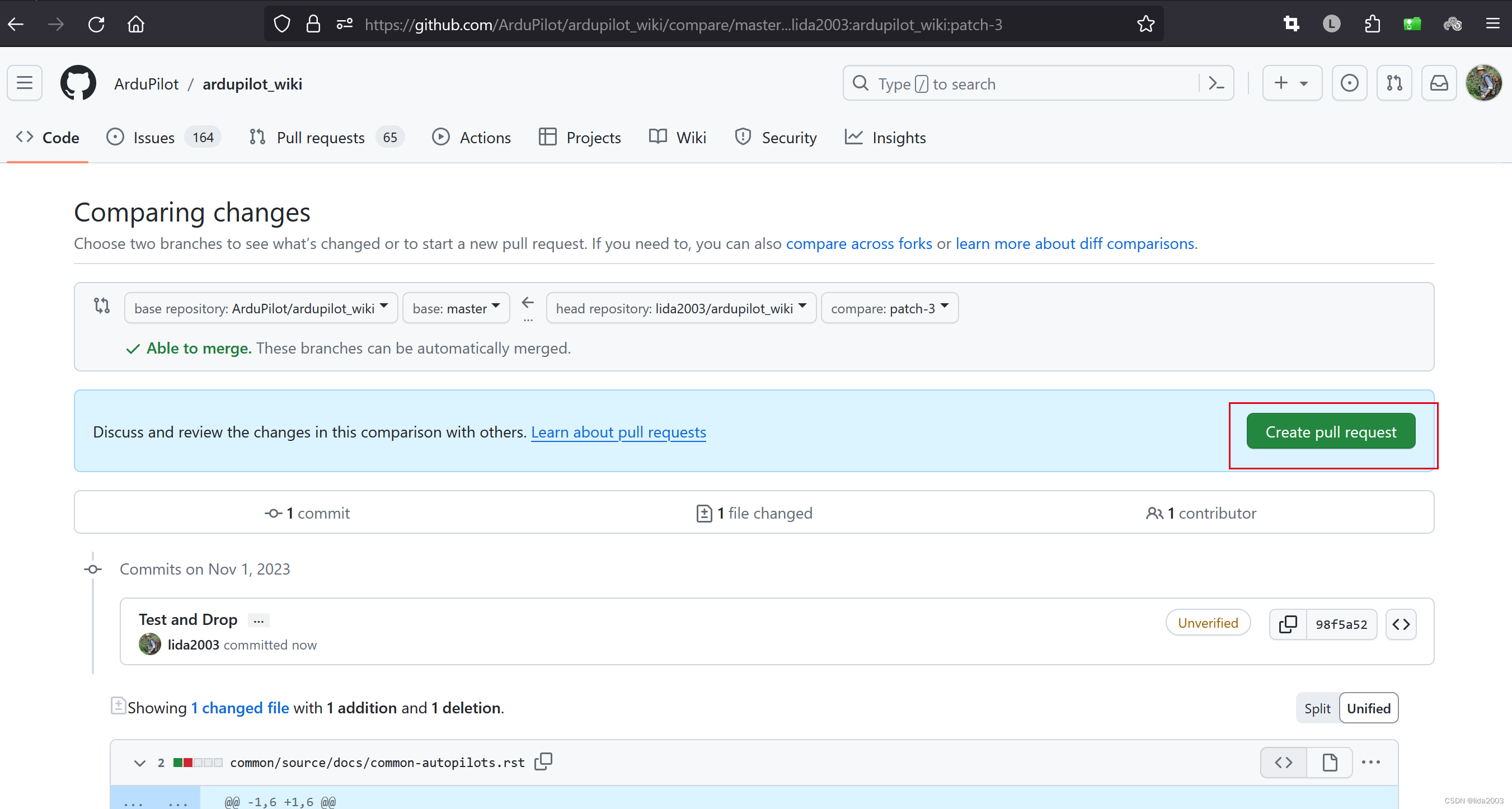
Ardupilot开源飞控之Wiki修改操作
Ardupilot开源飞控之Wiki修改操作 1. 源由2. 页面编辑修改2.1 Step 1: 申请Github账号2.2 Step 2: 选择修改页面2.3 Step 3: 修改页面内容2.4 Step 4: 提交修改2.5 Step 5: 新增PR 3. 增删页面修改3.1 Step 1: 克隆本地的Ardupilot Wiki3.2 Step 2: 搭建本地验证环境3.3 Step 3…

APM飞控使用动捕等外部定位
本文初次写于2023.03.03,pixhawk飞控应该是刷写了ArduPilot 4.1以上的版本。
机载计算机通过WIFI和vrpn_ros_client获取动捕系统(vicon或者nokov)的无人机定位数据(x,y,z四元数),然…

ardupilot的编译过程
环境
树莓派4b ubuntu20.04 git 2.25.1 python3.8.10 pixhawk2.4.8
下载源码
(已经配置好git环境和ssh)
git clone --recurse-submodules gitgithub.com:ArduPilot/ardupilot.gitcd ardupilotgit status使用git status检查是否下载完整 如果不完整&a…

ardupilot开发 --- CAN BUS、DroneCAN 、UAVCAN 篇
1. CAN BUS、DroneCAN 、UAVCAN 区别
UAVCAN是一种轻量级协议,旨在通过CAN BUS 在航空航天和机器人应用中实现可靠通信。 UAVCAN网络是分散的对等网络,其中每个对等体(节点)具有唯一的数字标识符 - 节点ID,并且仅需要…
(4)(4.5) Underwater Sonar (Analog)
文章目录
前言
1 推荐硬件
2 连接和配置
3 参数说明 前言
本页详细介绍了低成本模拟水下声纳(又称"探鱼器")和数字转换器的设置,数字转换器可将模拟读数转换成 NMEA 0183,供 ardupilot 读取。这种设置可以测量船下…

(10)(10.8) 固件下载
文章目录
前言
10.8.1 固件
10.8.2 Bootloader
10.8.3 APM2.x Autopilot
10.8.4 许可证
10.8.5 安全 前言
固件服务器(firmware server)可提供所有飞行器的最新固件。其中包括:
CopterPlaneRoverAntennaTrackerSub
本页提供了一些被视为&quo…

(1)(1.9) HC-SR04声纳
文章目录
前言
1 连接到自动驾驶仪
2 参数说明 前言
HC-SR04 声纳是一种价格低廉但量程很短(最远只有 2m)的测距仪,主要设计用于室内,但也成功地在室外的 Copter 上使用过。极短的测距范围使其用途有限。 !Warning…
ArduPilot开源飞控之AP_AHRS
ArduPilot开源飞控之AP_AHRS 1. 源由2. 框架设计2.1 启动代码2.2 任务代码 3. 重要例程3.1 init3.2 update 4. 外部AHRS传感模块4.1 init4.2 update 5. 参考资料 1. 源由
AHRS(Attitude Heading Reference System): 飞控最为重要的一个任务就是姿态、位置、方向计算。
本章节…
ArduPilot开源飞控之AP_ExternalAHRS_VectorNav
ArduPilot开源飞控之AP_ExternalAHRS_VectorNav 1. 源由2. 框架代码2.1 启动代码2.2 任务代码 3. 重要例程3.1 AP_ExternalAHRS_VectorNav3.2 update_thread3.3 update 4. 串行协议4.1 check_uart4.2 process_packet14.3 process_packet24.4 process_packet_VN_100 5. 参考资料…
阿木实验室SpireCV安装脚本
#!/bin/sh# 下载安装包
wget https://download.amovlab.com/model/install/x86-nvidia/cuda-repo-ubuntu2004-11-6-local_11.6.2-510.47.03-1_amd64.deb
wget https://download.amovlab.com/model/install/x86-nvidia/cudnn-linux-x86_64-8.4.1.50_cuda11.6-archive.tar.xz
wge…
ardupilot开发 --- Lua脚本篇
概述
ArduPilot引入了对Lua脚本的支持; Lua脚本存放在 SD card 中; Copter-4.0 及以上版本才支持Lua脚本; scripting API ? scripting applets ? 飞控条件:2 MB of flash and 70 kB of memory ;…

(1)(1.10) JSN-SR04T声纳
文章目录
前言
1 连接到自动驾驶仪
2 参数说明 前言
JSN-SR04T 是一种超声波距离传感器。有两个版本 v2.0 和 v3.0。v2.0 的作用范围为 25 至 450cm,v3.0 的作用范围为 20 至 600cm。也更稳定。由于量程很短,因此使用范围有限。 1 连接到自动驾驶仪 …
(2)(2.10) LTM telemetry
文章目录
前言
1 协议概述
2 配置
3 带FPV视频发射器的使用示例
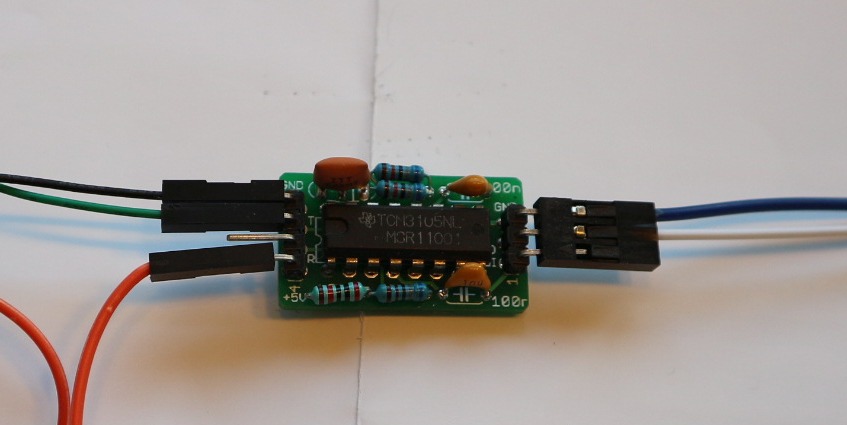
4 使用TCM3105的FSK调制解调器示例 前言
轻量级 TeleMetry 协议 (LTM) 是一种单向通信协议(从飞行器下行的数据链路),可让你以低带宽/低波特率(通常为 2400 波…
ArduPilot开源飞控之AP_Baro_SITL
ArduPilot开源飞控之AP_Baro_SITL 1. 源由2. back-end抽象类3. 方法实现3.1 AP_Baro_SITL3.2 _timer3.3 temperature_adjustment3.4 wind_pressure_correction3.5 update 4. 参考资料 1. 源由
鉴于ArduPilot开源飞控之AP_Baro中涉及Sensor Driver有以下总线类型:
…
(25)(25.1) 光学流量传感器的测试和设置
文章目录
25.1.1 测试传感器
25.1.2 校准传感器
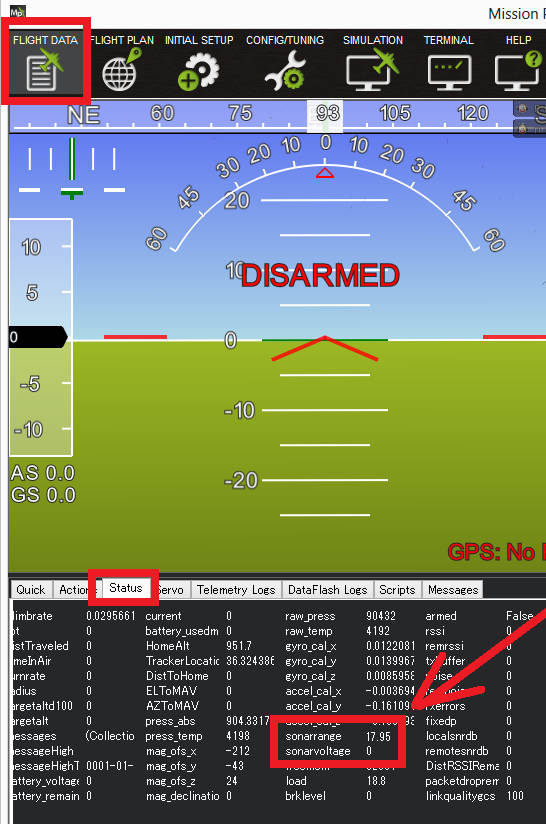
25.1.3 测距传感器检查
25.1.4 预解锁检查
25.1.5 首次飞行
25.1.6 第二次飞行
25.1.7 正常操作设置
25.1.8 视频示例(Copter-3.4)
25.1.9 空中校准 25.1.1 测试传感器
将传感器连接至自动驾驶仪…
ArduPilot之H743遗留配置问题解决
ArduPilot之H743遗留配置问题解决 1. 源由2. 资源3 遗留问题汇总3.1 问题一:无法设置VTX 600m3.2 问题二:双向Dshot未显示RMP转速3.3 问题三:mavlink esp32 2.4G WiFi电传 4. 视频5. 参考资料 1. 源由
在ArduPilot开源代码之H743BMI270x2Chi…
ArduPilot开源飞控之RC_Channels
ArduPilot开源飞控之RC_Channels 1. 源由2. 框架设计2.1 继承关系2.1.1 RC_Channel_Copter2.1.2 RC_Channels_Copter2.1.3 RC_Channels2.1.4 RC_Channel 2.2 启动代码2.3 任务代码 3. 重要例程3.1 RC_Channels3.2 init3.3 read_input3.4 update 4. 总结5. 参考资料 1. 源由
Ar…
(2)(2.12) Robsense SwarmLink
文章目录
前言
1 规格(根据制造商提供)
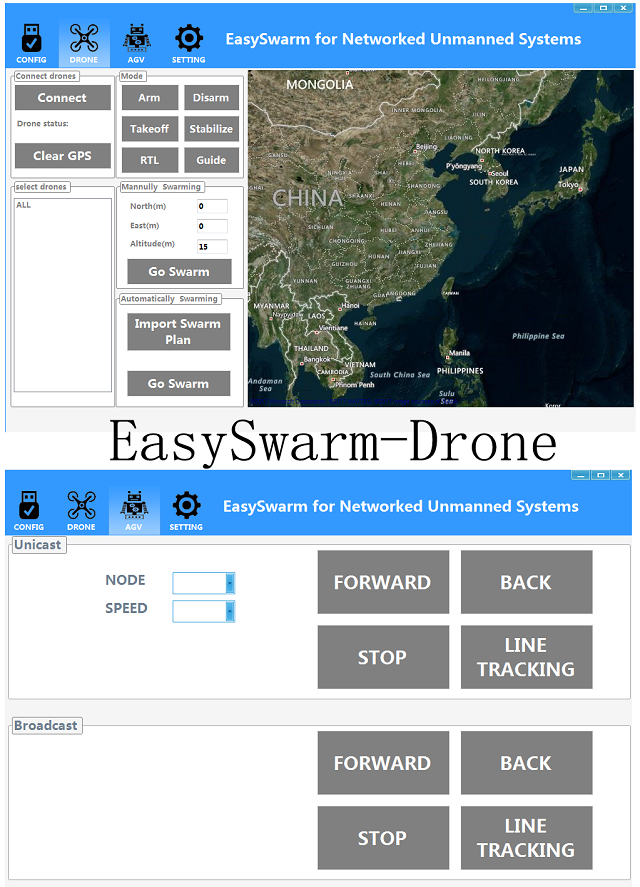
2 EasySwarm
3 参数说明 前言
Robsense SwarmLink 遥测无线电可将多架无人机连接到一个地面站,而无需在地面站一侧安装多个无线电(即创建一个网状网络)。此外,还…

(7)(7.4) 集结航点
文章目录
7.4.1 概述
7.4.2 设置集结航点
7.4.3 飞行示例
7.4.4 附录 7.4.1 概述
通常情况下,当固定翼或旋翼飞机进入"返回发射"(Return to Launch (RTL))模式(通常由自动驾驶仪失控保护触发)(failsafe)时,默认行为…

(10)(10.9) 术语表(一)
文章目录
前言
1 2.4Ghz
2 AGL
3 AHRS
4 APM
5 AMA
6 Arduino
7 APM (AutoPilot Mega)
8 ATC
9 Copter
10 Plane
11 Rover
12 BEC
13 Bootloader
14 COA
15 DCM
16 Eagle file
17 ESC
18 Firmware
19 FPV
20 FTDI 前言
!Note
术语表未编入索…
(2)(2.2) Lightware SF45/B(350度)
文章目录
前言
1 安装SF45/B
2 连接自动驾驶仪
3 通过地面站进行配置
4 参数说明 前言
Lightware SF45/B 激光雷达(Lightware SF45/B lidar)是一种小型扫描激光雷达(重约 50g),扫描度可达 350 度,扫描范围 50m。 1 安装SF45…
(1)(1.17) Maxbotix 模拟声纳
文章目录
前言
1 连接到Pixhawk
2 通过Mission Planner进行设置
3 测试传感器
4 参数说明 前言
XL-Maxbotix-EZ 系列模拟声纳(XL-MaxSonar-EZ0、EZ4 和 EZL0)是相对便宜的短距离(7m 至 10m)测距仪,主要设计用于室…
(1)(1.8) Hondex声纳
文章目录
前言
1 推荐的硬件
2 连接和配置
3 参数说明 前言
Hondex HE-8S 是一款回声测深仪(又称水下声纳),测深范围 100m,内置 GPS 和 NMEA 输出,可由 ArduPilot 使用。其他 Hondex 声纳也可以使用,但…
(2)(2.4) CRSF/ELRS Telemetry
文章目录
前言
1 ArduPilot 参数编辑器 前言
!Note
ELRS(ExpressLRS)遥控系统使用穿越火线协议,连接方式类似。不过,它不像穿越火线那样提供双向遥测。 TBS CRSF 接收机与 ArduPilot 的接口中包含遥测和遥控信息。…
(5)(5.4) 给新飞行员的建议
文章目录 前言 1 首次飞行 2 首次飞行的建议 3 关于低电池的警告 前言
本页为那些只有有限或没有遥控飞机或多旋翼飞机飞行经验的人提供一些初始飞行策略的建议。 1 首次飞行
将旋翼飞机放在平地上,连接电池--在陀螺仪校准完成之前(LED 灯闪烁红色和蓝…
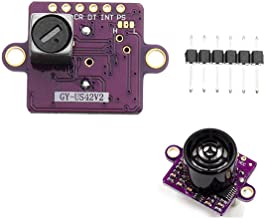
(1)(1.7) GY-US42声纳
文章目录
前言
1 连接方式
2 参数说明 前言
GY-US042v2 声纳是一款非常便宜的短程(最多 4m)测距仪,主要设计用于室内,但也成功用于室外的 Copter。与许多气压计相比,它能更稳定地控制 4m 以下的高度。 1 连接方式…
(1)(1.13) SiK无线电高级配置(一)
文章目录
前言
1 监控链接质量
2 诊断范围问题
3 MAVLink协议说明 前言
本文提供 SiK 遥测无线电(SiK Telemetry Radio)的高级配置信息。它面向"高级用户"和希望更好地了解无线电如何运行的用户。 !Tip
大多数用户只需要 SiK Radio v2 中提供的基本…
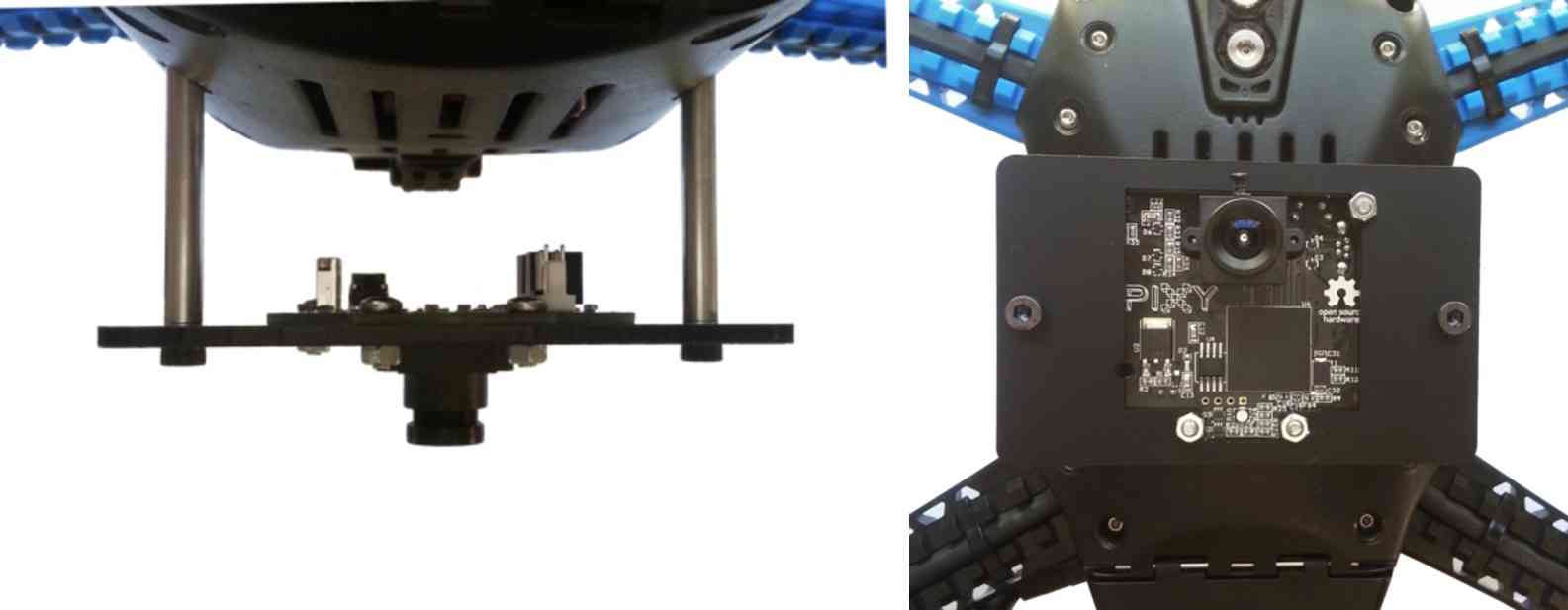
(30)精准降落和悬停(IRLock)
文章目录 30.1 概述
30.2 哪里可以买到
30.3 连接到自动驾驶仪
30.4 安装到框架上
30.5 通过任务规划器进行设置
30.6 飞行和测试 30.1 概述
Copter 支持使用 IR-LOCK 传感器(IR-LOCK sensor)和声纳或激光雷达(sonar or lidar)进行精确着陆。使用该系统,当飞行…
(16)燃油流量和液位传感器
文章目录 前言
16.1 燃油流量传感器
16.1.1 连接到自动驾驶仪
16.2 燃油液位传感器
16.2.1 PWM油位传感器
16.2.2 模拟油位传感器 前言
在 4.0 及以后的固件版本中,ArduPilot 提供了使用燃油流量和液位传感器的能力,此外还有电池监控器。支持脉冲输…

Ardupilot — EKF3使用光流室内定位代码梳理
文章目录
前言
1 Copter.cpp
1.1 void IRAM_ATTR Copter::fast_loop()
1.2 void Copter::read_AHRS(void)
1.3 对象ahrs说明
2 AP_AHRS_NavEKF.cpp
2.1 void AP_AHRS_NavEKF::update(bool skip_ins_update)
2.2 void AP_AHRS_NavEKF::update_EKF3(void)
2.3 对象EKF3说…